



























開芯課堂是黑芝麻智能打造的一檔技術分享類欄目,與大家分享我們的領先技術,展示我們的產品成果,通過專業技術沙龍、視頻直播、深度圖文,共同交流探討,一起進步,一起探索黑科技的世界。
什么是ISP?
ISP是Image Signal Processor 的簡稱,也就是圖像信號處理器,主要用來處理Image Sensor(圖像傳感器)的輸出數據。
由于鏡頭和sensor在不同的制造商之間差異很大,以及拍攝的光線條件多樣,鏡頭和sensor需要根據環境做適應,就像人眼要通過瞳孔縮放,適應環境明暗一樣。
ISP在能夠有效糾正和統一這些差異方面發揮著非常重要的作用,并且可以有效地將不同光譜特性的sensor數據按照預期需求統一實現。如果沒有ISP模塊,我們將很難生成人類預期的圖片質量。
圖1是常見的RGB的Bayer sensor處理的結果,從圖中可以看出,在同樣光源下不同sensor做白平衡之后色彩有比較明顯的差異,很難用統一的色彩校正矩陣來統一處理,這給當前一些基于RAW圖的AI感知算法(不帶ISP)的實際應用落地帶來挑戰。

圖1. 不同RGGB-Bayer sensor的色彩處理(白平衡后用統一的色彩校正矩陣處理)
更進一步,當前有很多sensor的光譜特性并不局限于RGB三色的Bayer模式,圖2是RCCB sensor及RGBIr sensor的ISP處理結果與原始圖像。在這些更加特別的光譜組合中,原始色彩更是與用戶直觀感知差別很大,如果缺少ISP的處理,后端感知算法處理這些數據就比較困難。

圖2. ISP處理不同光譜的Sensor數據:
上排:RCCB Sensor, ISP處理結果及原始數據顏色;下排: RGBIr Sensor, ISP處理結果及原始數據顏色
自動駕駛ISP的特殊性
自動駕駛對ISP提出了更高的設計需求,首先是低延時,手機拍攝可以允許1到2秒的延時,但這對自動駕駛而言是決不允許的,車輛“致盲”2秒在高速上就意味著跑出去50多米,這已經不能用危險來形容了。
因此車端芯片的ISP需要毫秒級的高處理率和高傳輸率。
此外自動駕駛汽車的ISP要求全時在線,面臨的場景也豐富的多,諸如被強光直射、黑夜、強弱光交替等極端場景,車端芯片自動駕駛的ISP需要解決這些挑戰。
黑芝麻智能NeuralIQ ISP優勢
色彩還原和渲染
自動駕駛場景中很多與顏色相關的重要信息,比如紅綠燈、道路地面上的各種標志線等等,都是后端感知算法識別場景的重要目標。在一些特殊光照條件下,這些色彩還原的難度增大,渲染出的色彩準確性降低,會給感知算法帶來不少困惑。
圖3是一個雨天路面場景,潮濕地面的反光和陰雨天較差的光照條件使得對比廠商的ISP產品整體顏色偏淡,對比度偏低,道路中心的對向車道分隔“雙黃線”顏色很淺,就有可能被誤識為同向車道分隔白線,從而使得自動駕駛做出錯誤的選擇和判斷,而給用戶帶來危險。經過NeuralIQ ISP處理之后的圖像,就準確恢復了原本的色彩。

圖3. 陰雨天道路場景色彩恢復:NerualIQ ISP (左)和其他廠商(右)ISP處理效果實拍圖
不同傳感器的噪聲一致化
不同的sensor在感光靈敏度和光譜方面都有自身的特點,從而在噪聲形態和噪聲強度方面各不相同。感知算法在處理圖像時,對于輸入圖像的信噪比(signal-to-noise ratio,SNR)有一定的要求,并且可處理的噪聲形態取決于訓練數據。可想而知當輸入圖像的噪聲形態和噪聲強度發生變化時,感知算法的正確性和準確性都會受到很大影響。而黑芝麻智能的NeuralIQ ISP可以使不同sensor采集到的數據具有類似的噪聲強度和噪聲形態,可以直接輸入給已訓練好的感知算法使用。
圖4反映了ISP對于不同sensor的不同噪聲的處理能力,上下兩行分別是兩個不同sensor的數據,原始數據的噪聲密度和噪聲形態不太一致,上排sensor的原始噪聲以團狀色噪聲為主,下排sensor的原始噪聲以散在單點噪聲為主,經過NeuralIQ ISP去噪模塊之后,兩種數據的效果很相似,噪聲去除的同時,信噪比也得到了比較大的提升,以符合感知算法的要求。
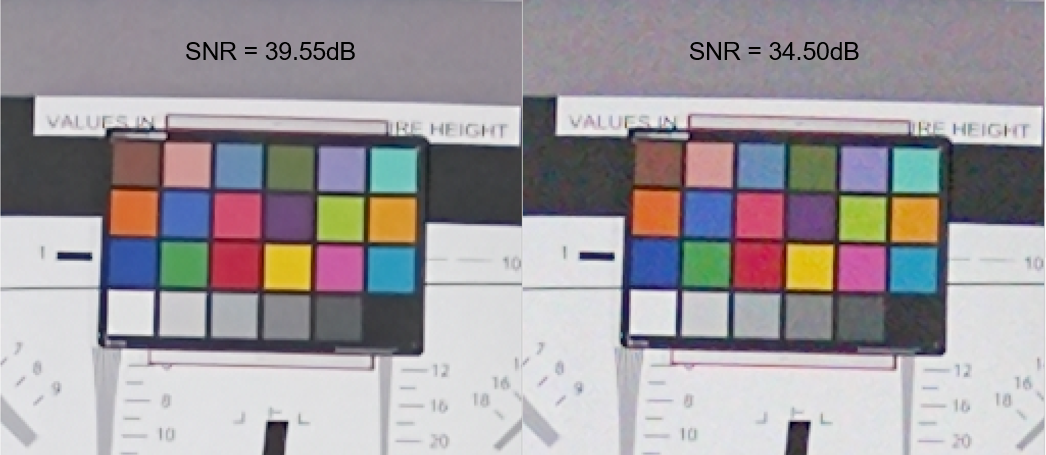
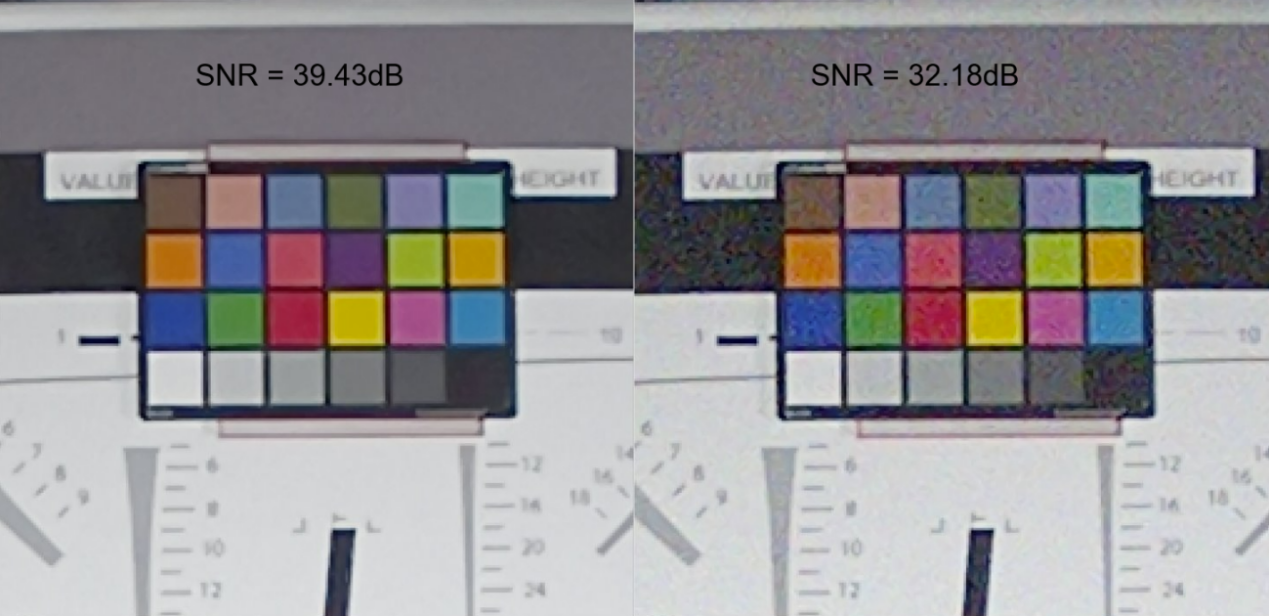
圖4. 不同sensor的不同噪聲:
上排:sensor1數據經過去噪算法(左)和沒經過去噪算法(右)的圖像;
下排: sensor2數據經過去噪算法(左)和沒經過去噪算法(右)的圖像
高動態范圍融合的畫面瑕疵處理
自動駕駛環境下,相機所遇到的場景的亮暗對比變化非常廣泛。一般相機單次拍攝所能捕捉到的數據動態范圍大約只有60-70dB,而車載環境下的場景往往可以高達140dB以上,單次拍攝很難直接捕捉到如此高動態范圍的場景。車載sensor中一般通過多種不同的技術,例如數字重疊技術(DOL/Stagger)、 雙轉換增益技術(DCG)、大小像素技術(LPD-SPD),以獲取對場景的“多重曝光“,從而合成出整個高動態范圍(HDR)場景的數據。通常場景中暗處靠著長曝光來捕捉,而高亮部分需要短曝光來捕捉。如此在不同曝光的重疊區域里,合成算法要保證顏色的準確性和合成過渡的自然性。

圖5. HDR合成的自然性和顏色準確性: NerualIQ ISP(左) 和其他廠商(右)ISP實拍圖
如圖5所示是一個典型的車載HDR場景,隧道里的亮度很低,隧道外通常是陽光照射下的高亮區域。在隧道口處通常就是典型的不同曝光合成的過渡區域,這個區域里有很多問題需要處理,比如色彩一致性問題,比如信噪比不連續問題等等。圖5右圖是其他廠商ISP處理結果,地面處出現嚴重斑駁,可能會被檢測為路面的缺陷而影響自動駕駛的決策,隧道外的路牌原本應為藍色,被合成為了褐色,這樣感知算法可能會把普通道路(藍色路牌)理解為風景區路牌(褐色)。而NerualIQ ISP就能很好處理這些信息。
多幀處理
夜晚或者室內低亮情況下,一般相機會通過延長曝光時間來達到合適的亮度。但是因為自動駕駛時候的車輛通常處于運動甚至高速運動狀態,曝光時間的增長會導致圖像中的運動模糊的增加;有時候哪怕運動速度不快,但是由于車輛處于轉彎狀態,遠處場景的轉彎線速度很大,模糊嚴重,這些都給感知算法的計算和識別帶來困難。
近些年多幀去噪算法(時域去噪)經歷了長足的發展。NeuralIQ ISP控制相機的曝光和增益,在曝光量(曝光時間x增益)相同的情況下,使用更短的曝光時間,更高的增益。針對減曝光+高增益圖像使用多幀技術,可以將噪聲水平控制在低增益水平上,同時因為基準單幀圖像的曝光時間的減少,運動模糊問題得到了很好的改善。

圖6. 多幀短曝光-高增益圖像減少運動模糊:NeualIQ ISP(左)和傳統單幀長曝光(右)-低增益圖像
圖6是一個典型的示例,傳統ISP做法如右圖,曝光時間30ms,3倍增益,因為車輛在行駛過程中,可以明顯觀測到運動模糊,上方指示牌的字體都具有重影,小號字體難以辨認;而NeualIQ ISP控制曝光時間10ms,9倍增益情況下,保持了總曝光量的不變,所以圖像亮度與傳統ISP類似,同時NeuralIQ ISP對圖像采用多幀降噪技術(本示例使用3幀降噪),所以盡管單幀圖像的增益高達9倍,處理結果的噪聲水平也與低增益圖像類似,噪聲得到了很好的抑制。由于NeuralIQ ISP的圖像基準曝光較短(比如10ms),單幀基準圖像的運動模糊就很小,處理結果中的物體和字符清晰可辨,無可見的運動模糊現象。
低延遲處理
如前所述,車載環境下的圖像輸出不能有太大的延遲,幾乎要達到“實時處理”的要求。NeuralIQ ISP從算法設計上就考慮算法的復雜度和算法的流水線結構。支持sensor數據流的在線和離線的混合處理模式。在線模式下,ISP輸出的延遲幾乎只取決于ISP算法本身所需的行緩存。典型場景下,NeuralIQ ISP數據處理的延遲不超過1毫秒,為后端感知算法實時獲取到圖像數據提供了有力的保障。
視覺與AI是智能駕駛領域的關鍵技術和基礎能力,而圖像質量對于視覺應用和算法識別起著至關重要的作用。黑芝麻智能車規級圖像處理器——NeuralIQ ISP,通過其強大的圖像處理能力,讓汽車洞察秋毫,萬事一清二楚,助力實現更安全的智能駕駛。
讓汽車“洞察秋毫”,秒懂自動駕駛ISP系列第一期就到此結束啦~讓我們相約下期的開芯課堂!
>開芯課堂下期預告:
針對自動駕駛場景下的圖像質量測量方法和標準問題,IEEE-SA P2020工作組正在推動建立新的標準,基于此背景,黑芝麻智能作為ISP領域的資深專家,正在積極探索新的技術和方法。








